
Система управления ракеты-носителя, выводящей космический летательный аппарат на заданную орбиту искусственного спутника Земли, должна обеспечить весьма малые погрешности как по величине, так и по угловым координатам вектора скорости, которую она сообщает летательному аппарату. При полетах к Луне и планетам ошибка вектора скорости, которая получается после выключения реактивного двигателя, сообщающего необходимое количество движения космическому летательному аппарату, должна бы еще меньше. Однако даже предельные возможности современных систем управления не позволяют сразу направить космический аппарат в заданный район лунной поверхности или обеспечить его попадание на одну из ближайших планет. Решение этих задач достигается путем однократной или многократной коррекции траектории полета.
Для осуществления коррекции траектории на борту аппарата устанавливают корректирующую двигательную установку с необходимым запасом топлива и систему коррекции, которая обеспечивает включение и выключение двигательной установки с тем, чтобы сообщить летательному аппарату необходимый импульс. Величину потребного для коррекции траектории импульса обычно вычисляют наземными средствами на основе обработки данных траекторных измерений и передают по радиоканалу на борт космического аппарата.
Для маневрирующих в космосе космических летательных аппаратов (для маневрирующих спутников, например типа «Полет», маневрирующих космических кораблей, космических аппаратов, предназначенных для стыковки на орбите, и др.) корректирующая сближающе-корректирующая двигательная установка используется для перехода с орбиты на орбиту, для коррекции орбиты, для сближения летательных аппаратов и удаления их друг от друга после расстыковки и для выполнения других маневров.
На всех спускаемых с орбиты космических летательных аппаратах устанавливается тормозная двигательная установка, которая обеспечивает переход с орбиты искусственного спутника Земли на траекторию спуска, сообщая аппарату необходимый тормозной импульс, снижающий скорость его полета.
Таким образом, для управления движением центра масс космических летательных аппаратов служат корректирующие и тормозные двигательные установки.
Включение тормозных и корректирующих двигательных установок производится только после того, как космический летательный аппарат будет ориентирован соответствующим образом в пространстве и обеспечена его стабилизация с тем, чтобы вектор тяги двигательной установки был повернут в нужном направлении.
Корректирующие двигательные установки используются также для торможения при запуске искусственных спутников Луны или планеты. Такая двигательная установка позволяет перевести космический летательный аппарат с траектории пролета мимо планеты на орбиту искусственного спутника планеты.
Одной из сложнейших задач управления космическими летательными аппаратами является процесс управления мягкой посадкой на поверхность Луны или планеты. Тормозная двигательная установка, обеспечивающая мягкую посадку, должна снизить относительную скорость летательного аппарата до величины, близкой к нулю, в момент приближения его к поверхности Луны или планеты, лишенной атмосферы. В том случае, когда требуется обеспечить спуск на планету, окруженную атмосферой, мягкую посадку наиболее выгодно осуществлять с помощью парашютной системы, которая вступает в действие после участка баллистического аэродинамического торможения, и лишь на последнем этапе для гашения остаточной скорости целесообразно использовать тормозную двигательную установку.
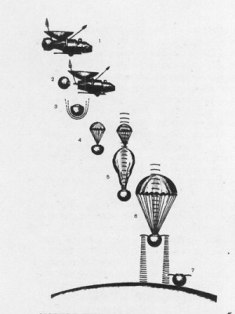
Схема полета в атмосфере и посадки спускаемого аппарата:
1 — Начало припланетного сеанса
2 — Отделение спускаемого аппарата (СА) от орбитального отсека
3 — Торможение СА в атмосфере
4 — Раскрытие тормозного парашюта
5 — Раскрытие основного парашюта
Начало передачи радиоинформации с борта СА
6 — Начало работы радиовысотомера
Научные измерения
7 — Посадка
Рассматривая типичные задачи управления движением центра масс космических летательных аппаратов, необходимо остановиться еще на одной задаче — использовании так называемой космической двигательной системы малой тяги для разгона или торможения космического аппарата. К числу таких двигательных систем относятся электрореактивные двигатели, «солнечный парус», «изотопный парус» и т. д. Электрореактивные двигатели обладают весьма высокой удельной тягой и обеспечивают малый расход массы на единицу тяги. Если лучшие современные двигатели на химическом топливе имеют удельную тягу порядка 320—350 килограммов на килограмм в секунду расхода топлива, то электрореактивные могут обладать тягой порядка нескольких тысяч единиц. Однако абсолютная величина тяги у таких двигателей не может быть сделана высокой и обычно составляет доли или единицы килограмма. Такой двигатель может применяться для медленного, но экономичного разгона космических аппаратов. Таким способом спутник Земли может перейти на раскручивающуюся спиральную траекторию и в конечном итоге на новую орбиту с высокими апогеем и перигеем или даже достигнуть второй космической скорости.
Используя эффект светового давления солнечных лучей, можно мыслить создание космического аппарата с большой поверхностью, ориентированной перпендикулярно направлению на Солнце. Благодаря световому давлению, на этот аппарат будет действовать постоянная сила, направленная в противоположную сторону от Солнца и составляющая около 4,5·10-6 ньютона на квадратный метр. При длительном действии она может быть использована для изменения полета или разгона космического летательного аппарата. Естественно, что создание такой силы не требует расхода массы.