
Важной проблемой космонавтики является создание крупных космических станций с длительным временем существования их на околоземной орбите. Такие станции имеют большие перспективы при решении различных задач освоения космического пространства. Многие научные исследования космического пространства и внеатмосферной астрономии, проведение продолжительных медико-биологических экспериментов требуют создания космических станций большого веса. Вывод на орбиту таких космических станций в собранном состоянии встречает огромные трудности. Для этого потребовались бы гигантские ракеты-носители
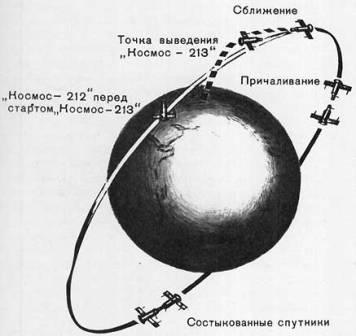
Схема автоматического сближения и стыковки спутников «Космос-212» и «Космос-213»
с огромным начальным весом. Действительно, выведение одного килограмма полезного уза на орбиту искусственного спутника Земли с помощью ракет с двигателями, работающими на химическом топливе, требуется около 50 кг начального веса ракеты-носителя. Поэтому даже для выведения космического корабля с 1—2 космонавтами на борту требуются ракеты с начальным весом в несколько сот тонн. Отсюда важнейшей задачей ракетно-космической техники является сборка космических станций на орбите. При этом каждый блок такой космической станции может доставляться на орбиту отдельной ракетой-носителем.
Автоматическая стыковка двух космических аппаратов на орбите — крупный этап решении этой грандиозной задачи. В принципе стыковка может осуществляться полностью автоматически или с участием человека. Решение как той, так и другой задачи представляет собой большой научный и практический интерес. Естественно, труднейшей задачей является осуществление полностью автоматической стыковки. Блестящее решение этой задачи советскими учеными и инженерами было продемонстрировано при автоматической стыковке космических аппаратов «Космос-186» и «Космос-188», которая впервые в истории космонавтики была автоматически осуществлена 30 октября 1967 года. 15 апреля 1968 года состоялась вторая автоматическая стыковка на орбите спутников «Космос-212» и «Космос-213». Трудность решения такой задачи становится очевидной, если учесть, что необходимо сблизить, обеспечить причаливание с относительной скоростью в несколько десятков сантиметров в секунду и соединить два аппарата, движущихся по орбитам со скоростью около 8 км/сек. К моменту стыковки требуется эти аппараты вывести на орбиты, достаточно близкие друг к другу по своим параметрам и лежащие в одной плоскости.
Рассмотрим основные принципы автоматической- стыковки и задачи управления процессом стыковки. Наиболее рациональное решение задачи автоматической стыковки получается, когда один космический аппарат является «активным», а другой — «пассивным». Активный аппарат осуществляет поиск пассивного аппарата в пространстве, обнаружение, подход к нему, сближение и причаливание. Пассивный аппарат при этом выполняет более простые функции: он должен ориентироваться определенным образом в пространстве и служить маяком для активного аппарата. Активный космический аппарат содержит радиосистему наведения, которая позволяет производить поиск в пространстве пассивного космического аппарата, измерение параметров относительного движения спутников и передает соответствующие сигналы на систему ориентации и автоматического управления движением аппарата. После окончания процесса поиска осуществляется разворот относительно линии визирования с помощью двигательных установок системы ориентации. А система управления движением включает двигательную установку активного спутника, обеспечивая управление процессом сближения по заданному закону. Закон управления сближением выбирается таким образом, чтобы обеспечить минимальный расход топлива. После того как спутники сблизятся на расстояние порядка 300 м, дальнейший процесс сближения осуществляется с помощью системы двигателей малой тяги, которая позволяет обеспечить тонкое регулирование сближения, и к моменту причаливания получить относительную скорость порядка 10—15 см/сек. При такой скорости обеспечивается безопасность стыковки. Стыковочный узел активного спутника представляет собой специальную штангу, а стыковочный узел пассивного спутника — приемный конус и устройство захвата и фиксации штанги.Интересны параметры орбит и некоторые данные, характеризующие эксперимент, осуществленный 30 октября 1967 года. Перед стыковкой «Космос-186» (активный аппарат) имел следующие параметры орбиты: период обращения — 88,64 мин; минимальное удаление от Земли (в перигее) —180 км; максимальное удаление от Земли (в апогее) — 260 км; наклонение — 51,68°. «Космос-188» (пассивный аппарат) имел при выходе следующие параметры: период обращения — 88,97 мин; минимальное удаление от Земли (в перигее) — 200 км; максимальное удаление от Земли (в апогее) — 276 км; наклонение — 51,68°. После вывода спутника «Космос-188» на орбиту расстояние между спутниками составляло около 24 км, а их относительная скорость была порядка 25 м/сек. При этих начальных данных был осуществлен полностью автоматический процесс поиска, сближения, причаливания и стыковки спутников, а затем их совместный полет как единого жесткого тела в течение 3,5 ч. Все операции во время этого процесса регистрировались телеметрической системой, а на участке вне зоны радиовидимости — записывались на запоминающем устройстве.
После команды с Земли спутники были расстыкованы и перешли на самостоятельные орбиты, а в дальнейшем каждый из них совершил посадку в заданном районе Советского Союза. Как известно, процесс расстыковки и плавного удаления спутников друг от друга можно было наблюдать с помощью системы космического телевидения. Успешное завершение этого грандиозного эксперимента открывает широкие перспективы создания орбитальных научных станций для исследования космического пространства и сложных космических систем для межпланетных полетов. Этот эксперимент подтвердил правильность принципов построения и технических решений создания автоматических систем управления стыковкой спутников на орбите.